
Tags
- opencv
- 모션제어
- motion recognition
- UART
- 태양광 휴대폰케이스
- pcb 설계
- Motion Estimation
- SIOR-TITAN
- 태양광
- 태양광 충전케이스
- EasyEDA
- 태양전지
- Arduino
- 체험지수
- 윈도우10
- RQ-TITAN
- Imitating Arm
- JLCPCB
- odyssey x86J4105
- artwork
- 아두이노
- 오디세이 x86
- Python
- 태양광 충전 휴대폰케이스
- Canny
- PCB Artwork
- pcb
- opencv-python
- 태양 충전 케이스
- Video
Archives
- Today
- Total
제너럴공국
Imitating Arm - 모션 인식 로봇팔 본문
반응형
본 글은 "제작과정"이 아닌 "결과물"만을 포함하고 있습니다.
부제: 3-finger Adaptive Gripper controlled by motion recognition
제 7회 ICT 스마트디바이스 전국공모전(과학기술정보통신부) - 일반부문 장려상 수상했습니다.
<작품소개>


실제 재난로봇에서 많이 채택되는 3-finger Adaptive Gripper의 VISION 인식을 통한 새로운 제어방법입니다. 이 로봇은 손의 관절간 각도를 계산해, 그 관절의 각도에 따라 움직입니다.
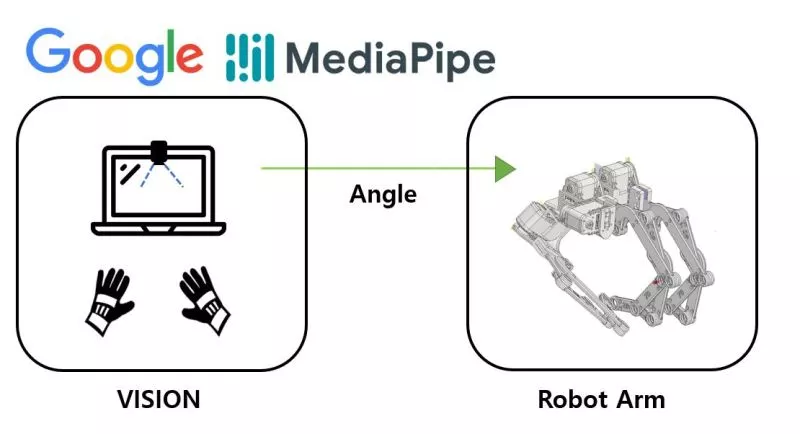
<작동법 개요>
구글의 MediaPipe를 이용하여 손가락 관절의 키포인트를 인식합니다. 이후 각 키포인트 사이의 각도를 계산합니다.이후 엄지, 검지 중지의 각도에 따라, 3-finger Adaptive Gripper가 동작합니다.
<하드웨어>
3개의 손가락과, 4 자유도, 6-bar 링크 구조를 가진 손을 설계하였습니다.



실제 출력 및 조립후 동작은 다음과 같습니다.


<소프트웨어>
Google의 Mediapipe를 사용하였습니다.

<시연영상>



반응형
'프로젝트' 카테고리의 다른 글
| Imitating Arm - 모션 인식 로봇팔 Ver2.0 (2) | 2021.11.26 |
|---|---|
| SIOR-TITAN (휴머노이드 되살리기) (5) | 2021.11.26 |
| 우울증 치료로봇 - I will make you smile (1) | 2020.11.30 |
| 야생동물 로드킬 방지 경보기 (1) | 2020.11.30 |
| 안전 Hat - 스마트 안전모 (1) | 2020.11.30 |
'프로젝트' Related Articles
more




Comments